
○機体諸元
Wing Span 1540
full length 740
Controller Pixhawk
Max Speed 90Km/h
Flight time 15Min
*GPSによりオートモードで飛行可能。
*RTLは飛行機なのでホームポイントを基点に、パラメーター設定した半径・高度・スピードで旋回します。
*コースロック機能、ステックを0,5秒何も動かさなかったら今の状態のコース・高度・気速(ピートー管付き)保ってオートで飛んで行きます。
*オートモードはミッションプランナーと言うソフトで、ポイント・高度・スピード指定してコントローラーに転送、飛行中にオートモードに
に入れると転送した情報通り飛行します。
*ある程度の広さが有れば、オート離陸・オート着陸も可能。
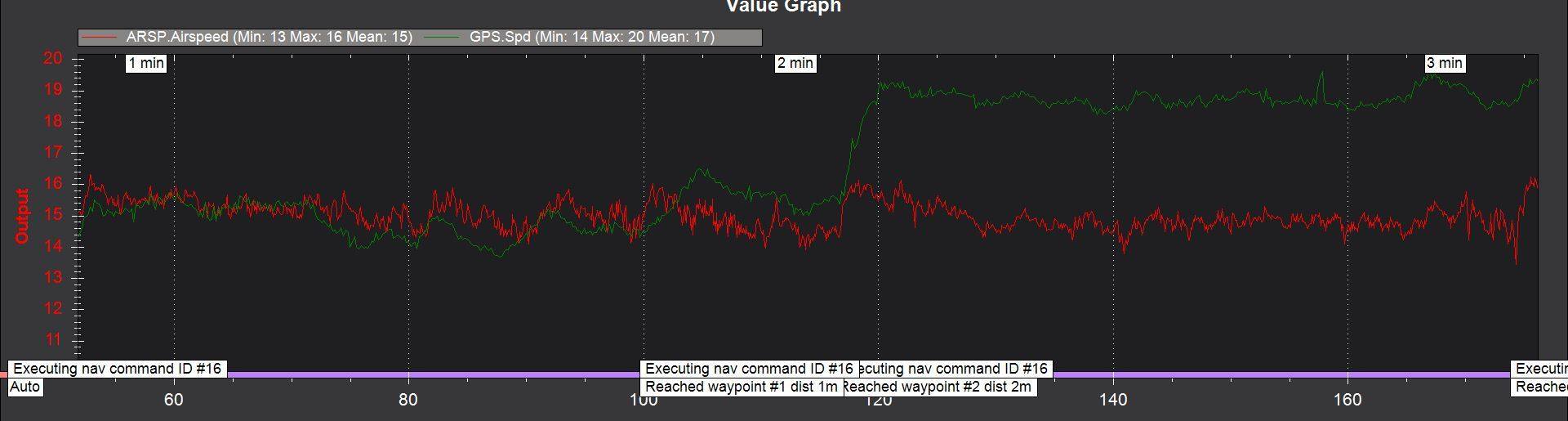
○機体には対気スピードセンサー(ピトー管)を付けています、失速スピードなどのデータをパラメーターに入れておくと、コントローラーがスピード制御するモードで
飛行中に追い風などの状態で飛行中でも対気スピードセンサーがのお陰で失速は回避出来ます、下記の画像は赤ラインが対気スピード、グリーンラインは対地スピード、
途中でラインの高さが逆転している所で機体が方向を変えた所です、風に対する向き変わるので対地スピードは変わっていますが、対気スピードは一定です、一番センサ
ー取付の効果が分かる所です。
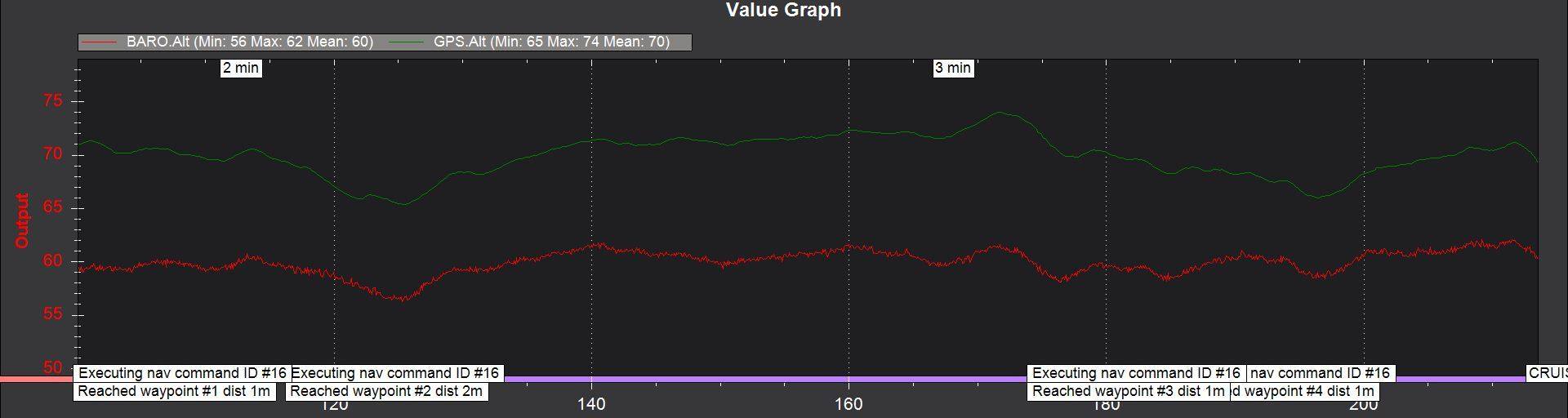
○下の画像はオート飛行時の飛行高度です、赤ラインはホームポジションを基点にした高度、グリーンのラインは海抜高度です、目標高度は60mに設定していました。
○飛行時の動画
オート飛行オンリー(前回のオート飛行の部分のみ・飛行距離2.7Km)
マニュアル飛行・コースロック飛行・オート飛行(離着陸までフルバージョン)
マニュアル飛行・コースロック飛行(離着陸までフルバージョン)
マニュアル飛行・コースロック飛行
マニュアル飛行・コースロック飛行・オート飛行
マニュアル飛行・コースロック飛行・オート飛行
カメラアングルを45度後方にセット
Back